Amerykańscy naukowcy opracowali nowatorskie, miękkie, elastyczne i konfigurowalne urządzenie do pobierania próbek, które może pomóc w zbieraniu różnych rodzajów organizmów z morza, nie szkodząc im.
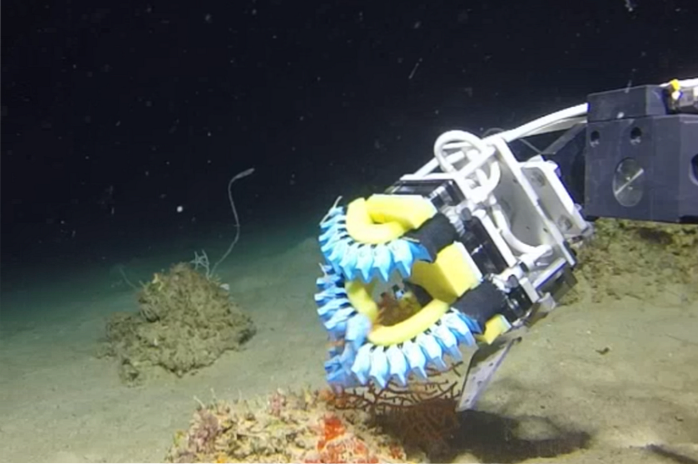
Urządzenie „miękki chwytak”, które ma od dwóch do pięciu „palców” wykonanych z poliuretanu i innych miękkich materiałów, które otwierają się i zamykają za pomocą niskociśnieniowej pompy hydraulicznej, która wykorzystuje wodę morską do napędzania ich ruchu.
Badanie podwodnych organizmów morskich wymagało specjalistycznego sprzętu zamontowanego na zdalnie sterowanym pojeździe (ROV), ponieważ każdy inny sprzęt mógłby pęknąć pod ciśnieniem.
„Wiele zwierząt, które spotykamy w głębinach morskich, to nowe gatunki, a te miękkie roboty pozwalają nam na delikatną interakcję i badanie bardziej zróżnicowanego zestawu fauny” - powiedział David Gruber, profesor z City University of New York.
Chwytaki były przymocowane do drewnianej kuli, którą trzymano i manipulowano za pomocą zdalnie sterowanych pojazdów typu ROV, twardych narzędzi przypominających pazury, kontrolowanych przez człowieka na statku, do którego przymocowany był zdalnie sterowany zdalnie sterowany pojazd..
W badaniu opublikowanym w czasopiśmie PLOS ONE zespół przetestował najnowszą wersję swoich miękkich chwytaków podczas rejsu na pokładzie statku R / V Falkor w odległym obszarze chronionym wysp Phoenix na południowym Pacyfiku..
Miękkie chwytaki były w stanie zbierać ślimaki morskie, korale, gąbki i inne morskie stworzenia znacznie skuteczniej i przy mniejszych uszkodzeniach niż tradycyjne podwodne narzędzia do pobierania próbek.
Na podstawie informacji uzyskanych od operatorów ROV zespół wydrukował w 3D przedłużenia „paznokci”, które można było dodać do palców chwytaka, aby pomóc im dostać się pod próbki leżące na twardych powierzchniach..
Elastyczna siatka została również dodana do każdego palca, aby pomóc utrzymać próbki w uchwycie palców.
Inna, dwupalcowa wersja chwytaków została również stworzona w oparciu o znajomość pilotów ROV ze sterowaniem istniejącymi chwytakami dwupalczastymi i ich prośbę, aby dwa palce były w stanie trzymać próbki zarówno chwytem „szczypiącym” (w przypadku małych obiektów). i chwyt „mocy” (dla dużych obiektów).


